

Robotų užduočių vykdymas atviro pasaulio aplinkoje kelia didelių iššūkių dėl didžiulės būsenos veiksmų erdvės ir dinamiško nestruktūrizuotų nustatymų pobūdžio. Tradiciniai robotai kovoja su netikėtais objektais, įvairia aplinka ir užduočių neaiškumais. Esamoms sistemoms, dažnai skirtoms kontroliuojamai arba iš anksto nuskaitytai aplinkai, trūksta pritaikomumo, reikalingo veiksmingai reaguoti į pokyčius realiuoju laiku ar nepažįstamas užduotis. Šie apribojimai pabrėžia skubų lankstesnių, keičiamo mastelio metodų poreikį, kad robotai galėtų atlikti sudėtingas, ilgalaikes užduotis naudodami natūralios kalbos komandas. Esminis iššūkis yra užtikrinti patikimą sprendimų priėmimą realiuoju laiku ir klaidų atkūrimą, kurie yra būtini norint patikimai atlikti užduotis įvairiose, nestruktūrizuotose aplinkose.
Dabartinėse užduočių planavimo robotinėse sistemose paprastai naudojami tokie metodai kaip baigtinės būsenos mašinos, konkrečios srities kalbos (pvz., PDDL) arba mokymosi modeliai. Šie metodai, nors ir veiksmingi esant ribotam scenarijui, yra ribojami dėl jų priklausomybės nuo struktūrinės aplinkos ir didelių duomenų kiekių. Hierarchiniai ir imitaciniai mokymosi metodai siūlo alternatyvas, tačiau dažnai jiems trukdo jų skaičiavimo sudėtingumas ir didelių mokymo duomenų rinkinių poreikis. Šie metodai taip pat susiduria su mastelio keitimo problemomis, nes jiems sunku prisitaikyti, kai jie pristatomi naujoje, nenuspėjamoje aplinkoje. Pagrindinis šių metodų apribojimas yra jų trapumas ir nesugebėjimas dinamiškai atsigauti po klaidų, todėl jie netinkami naudoti realiuoju laiku labai kintančioje aplinkoje, pavyzdžiui, namuose ar pramoninėse vietose.
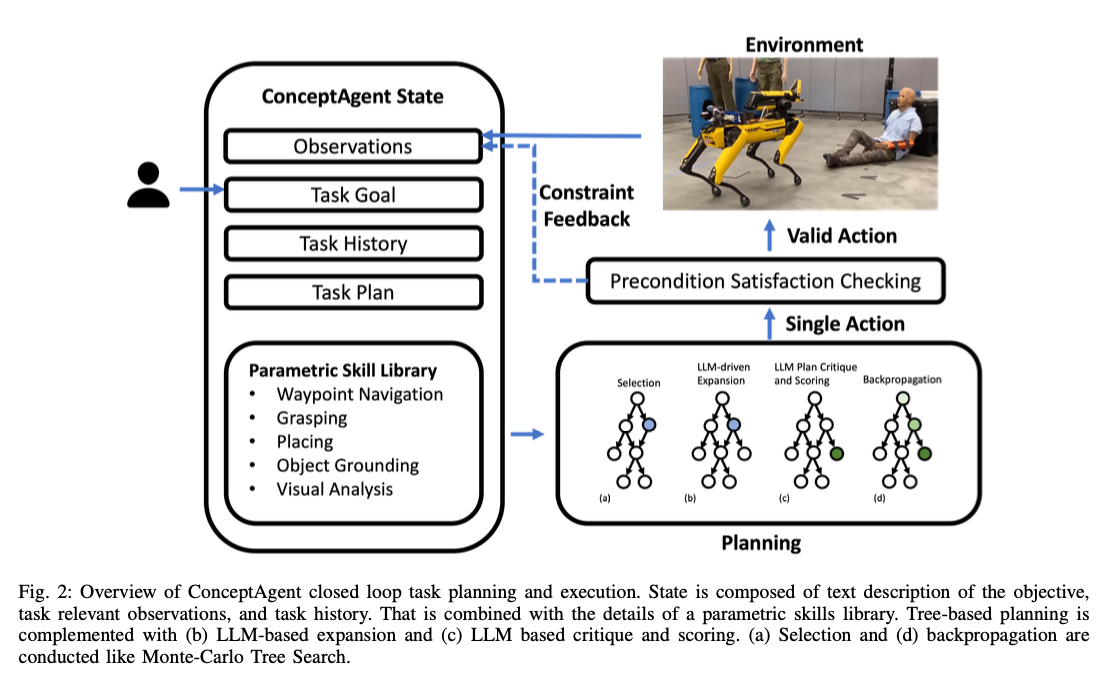
Mokslininkai iš MIT, JHU ir DEVCOM ARL pristatė ConceptAgentAI sistema, skirta pagerinti užduočių planavimą ir vykdymą nestruktūrizuotoje aplinkoje. „ConceptAgent“ apima dvi pagrindines naujoves:
- Predikato įžeminimas: oficialus metodas, kuris patikrina veiksmo pagrįstumą prieš vykdymą, patikrindamas išankstines sąlygas, užkertant kelią neįmanomiems veiksmams ir leidžiantis atkurti gedimą.
- LLM vadovaujama Monte Karlo medžio paieška (LLM-MCTS): Šis metodas praturtina tradicinę medžio paiešką dinamine savirefleksija, leidžiančia robotui ištirti kelias būsimas būsenas ir efektyviai patobulinti savo planus. Išnaudodama LLM argumentavimo galią, ConceptAgent gali dinamiškai generuoti ir koreguoti užduočių planus, užtikrindama efektyvų užduočių atlikimą didelėje ir sudėtingoje aplinkoje.
Šios naujovės žymiai pagerina sistemos gebėjimą priimti sprendimus realiuoju laiku, todėl ji yra labiau pritaikoma ir pritaikoma nei esami metodai.

„ConceptAgent“ veikia modeliavimo aplinkose, tokiose kaip AI2Thor, ir realaus pasaulio sąrankose, apimančiose robotines platformas, tokias kaip „Spot“. Tai padeda LLM patobulinti tradicinę Monte Karlo medžio paiešką dinamišku, save atspindinčiu planavimu. Pagrindinės sistemos funkcijos sukasi aplink 3D scenos grafikaikurios realiu laiku pateikia roboto aplinkos abstrakcijas. Šios scenos diagramos yra suderintos su natūralios kalbos instrukcijomis, todėl ConceptAgent gali efektyviau interpretuoti ir reaguoti į konkrečios užduoties komandas.
Eksperimentiniam patvirtinimui tyrėjai panaudojo duomenų rinkinį 30 imituotų objektų pertvarkymo užduočių virtuvės aplinkoje, papildyta 40 papildomų užduočių skirstomi į vidutinio sunkumo ir sunkius. Šios užduotys patikrina agento gebėjimą susidoroti su didėjančiu sudėtingumu, įskaitant paslėptus objektus ir dviprasmiškus užduočių aprašymus. Rezultatus dar labiau sustiprino realaus pasaulio bandymai, kai „ConceptAgent“ vadovaujamas „Spot“ robotas atliko mobilias manipuliavimo užduotis atsitiktinėse, mažai netvarkingose aplinkose.
„ConceptAgent“ parodė pastebimą užduočių atlikimo pagerėjimą tiek modeliuotoje, tiek realioje aplinkoje. Modeliavimo metu jis pasiekė užduoties atlikimo rodiklį 19 % atliekant lengvo lygio objektų pertvarkymo užduotis, gerokai pranokstančias pradinius modelius, tokius kaip „ReAct“ ir „Tree of Thoughts“, kurių atlikimo rodiklis buvo maždaug 8–10%. Be to, atlikdamas vidutinio sunkumo ir sunkias užduotis, ConceptAgent pademonstravo a 20% padidina užduoties sėkmę dėl išankstinio įžeminimo ir LLM-MCTS integravimo, patvirtinančio šių komponentų efektyvumą. Realaus pasaulio bandymuose, kai „Spot“ robotas buvo išbandytas atsitiktinių imčių, mažai netvarkingoje aplinkoje, „ConceptAgent“ sėkmingai baigtas. 40% užduočiųpabrėžiant jo puikų našumą atliekant manipuliavimo mobiliuoju įrenginiu užduotis. Sistemos bendri rezultatai pabrėžia patobulintą planavimo efektyvumą, pritaikomumą ir gebėjimą atsigauti po klaidų, todėl tai yra patikimas sprendimas sudėtingoms, atviro pasaulio robotizuotoms programoms.

Apibendrinant galima pasakyti, kad ConceptAgent yra pažangus sprendimas nuolatiniams užduočių planavimo ir vykdymo iššūkiams atviroje aplinkoje. Integruodama predikatinį įžeminimą ir LLM vadovaujamą medžio paiešką, sistema pagerina prisitaikymą, todėl robotai gali atlikti užduotis dinamiškais, nenuspėjamais parametrais. Šie įnašai yra labai svarbūs siekiant pažangos robotikos srityje, nes jie pašalina pagrindinius esamų metodų apribojimus ir sudaro sąlygas lankstesnėms, klaidoms atsparesnėms užduočių vykdymo sistemoms. Įrodyta ConceptAgent sėkmė tiek imituotų, tiek realių bandymų metu išryškina jos plataus pritaikymo galimybes tokiose srityse kaip namų automatika, sveikatos priežiūra ir pramoninė robotika.
Patikrinkite Popierius. Visi nuopelnai už šį tyrimą tenka šio projekto tyrėjams. Taip pat nepamirškite sekti mūsų Twitter ir prisijunk prie mūsų Telegramos kanalas ir LinkedIn group. Jei jums patinka mūsų darbai, jums patiks ir mūsų darbai naujienlaiškis.. Nepamirškite prisijungti prie mūsų 50 000+ ML SubReddit
(Būsimas įvykis – 202 m. spalio 17 d.) RetrieveX – „GenAI“ duomenų paieškos konferencija (reklamuojama)
Aswin AK yra MarkTechPost konsultavimo praktikantas. Jis siekia dvigubo laipsnio Indijos technologijos institute, Kharagpur. Jis yra aistringas duomenų mokslui ir mašininiam mokymuisi, turintis tvirtą akademinį išsilavinimą ir praktinę patirtį sprendžiant realaus gyvenimo kelių sričių iššūkius.





