

Imitacinis mokymasis (IL) yra vienas iš metodų robotika kur robotai mokomi imituoti žmogaus veiksmus remiantis ekspertų demonstracijomis. Šis metodas priklauso nuo prižiūrimo mašininio mokymosi ir reikalauja daug žmogaus sugeneruotų duomenų, kad būtų galima vadovautis roboto elgesiu. Nors imitacinis mokymasis yra veiksmingas atliekant sudėtingas užduotis, jį riboja didelio masto duomenų rinkinių trūkumas ir duomenų rinkimo mastelio sunkumai, skirtingai nei kalbos ir regėjimo modeliai. Mokymasis iš žmonių vaizdo demonstracijų susiduria su dideliais iššūkiais, nes robotai negali prilygti žmogaus rankų jautrumui ir lankstumui. Dėl šių skirtumų sunku efektyviai dirbti imitacinį mokymąsi arba išplėsti bendrąsias roboto užduotis.
Tradicinis imitacinis mokymasis (IL) rėmėsi žmogaus valdomais robotais, kurie buvo veiksmingi, tačiau susidūrė su dideliais apribojimais. Šios sistemos yra pagrįstos nuotoliniu valdymu pirštinėmis, judesio fiksavimu ir VR įrenginius ir pasikliauti sudėtingomis sąrankomis bei mažos delsos valdymo kilpa. Jie taip pat rėmėsi fiziniais robotais ir specialios paskirties aparatine įranga, kurią buvo sunku pakeisti. Nors robotai galėjo atlikti tokias užduotis, kaip baterijų įdėjimas ar batų raištelių rišimas, naudodamiesi šiais metodais surinktais ekspertų duomenimis, dėl specialios įrangos poreikio tokie metodai tapo nepraktiški didelio masto ar bendresniam naudojimui.
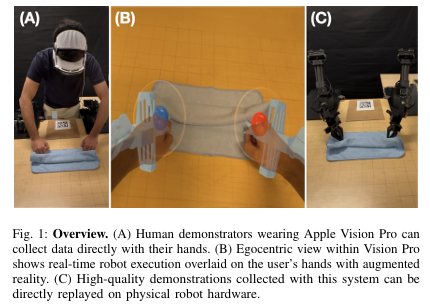
Norėdami tai išspręsti, „Apple“ ir Kolorado Boulderio universiteto mokslininkų grupė pasiūlė ARMADA sistema, kuri integruoja Apple Vision Pro ausinės su išoriniu roboto valdymu, naudojant ROS ir WebSockets derinį. Ši sąranka leido bendrauti tarp įrenginių, kur sistema galėjo būti prijungta ir paleidžiama ir buvo lanksti daugeliui robotų platformų, pvz. Franka ir UR5tik pakeičiant 3D ausinių modelio failus ir duomenų formatavimą. The ARMADA programėlė tvarkė roboto vizualizaciją, duomenų saugojimą ir vartotojo sąsają, gauna transformacijos kadrus robotų nuorodoms, fiksavo vaizdo kadrus iš kamerų ir seka žmogaus skeleto duomenis apdorojimui. Roboto mazgas valdė valdymą, duomenų saugojimą ir apribojimų skaičiavimą, skeleto duomenis paversdamas roboto komandomis ir aptikdamas darbo srities pažeidimus, ypatumus ir greičio problemas, kad būtų galima gauti grįžtamąjį ryšį realiuoju laiku.

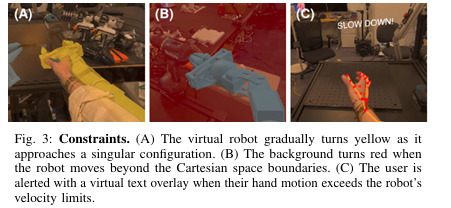
Roboto judesiai buvo suderinti su žmogaus riešo ir pirštų padėtimi, sekami ARKit in vision 2.0, naudojant atvirkštinę kinematiką, kad apskaičiuotų sąnarių padėtis ir valdytų griebtuvą pagal pirštų tarpus. Apribojimai, pvz., išskirtinumas, darbo vietos ribos ir greičio pažeidimai, buvo vizualizuojami keičiant spalvas, virtualias ribas arba tekstą ekrane. Tyrėjai naudojo ARMADA sistemą, kad atliktų tris užduotis: iš dėžutės paimti servetėlę, įdėti žaislą į kartoninę dėžę ir abiem rankomis nuvalyti stalą. Kiekviena užduotis turėjo penkias pradines būsenas, o sėkmė buvo pagrįsta konkrečiais kriterijais. Dėvėti Apple Vision Pro su įjungta ARMADA programine įranga visionOS 2.0, pateikti dalyviai 45 demonstracijos trimis grįžtamojo ryšio sąlygomis: Nėra atsiliepimų, Atsiliepimaiir Paskelbti atsiliepimą. Riešo ir pirštų judesiai buvo stebimi realiu laiku ARKito roboto judesiai buvo valdomi naudojant atvirkštinę kinematiką, o sąnarių trajektorijos buvo įrašytos pakartojimui.
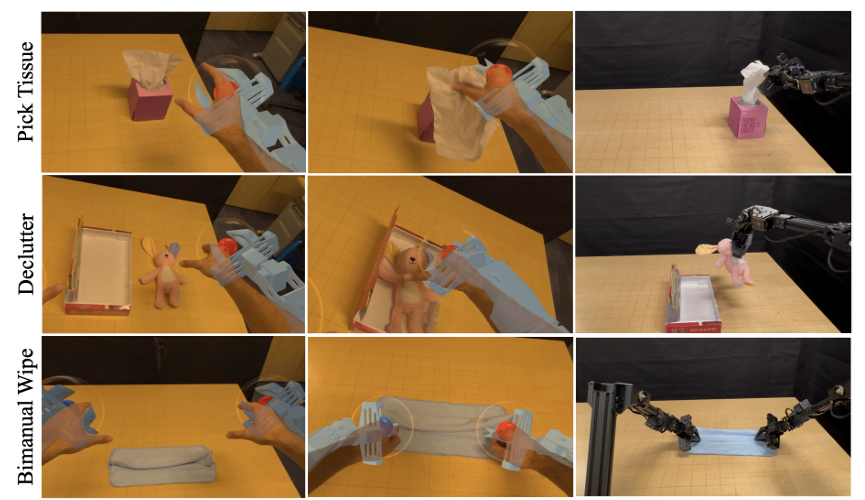
Įvertinus, rezultatai parodė, kad grįžtamojo ryšio vizualizacija žymiai pagerino pakartojimo sėkmės rodiklius atliekant tokias užduotis kaip Pasirinkite „Tissue“., Netvarkair Dvirankis valymassu pelnu iki 85 % palyginti su atsiliepimų nebuvimu. Po grįžtamojo ryšio demonstracijos taip pat parodė patobulinimus, tačiau buvo mažiau veiksmingos nei atsiliepimai realiuoju laiku. Dalyviai suprato, kad grįžtamasis ryšys buvo intuityvus ir naudingas norint suprasti roboto judesį, o sistema gerai veikė įvairaus patirties lygius turintiems naudotojams. Įprasti gedimų režimai be grįžtamojo ryšio yra netikslios roboto pozos ir griebtuvo problemos. Dalyviai koregavo savo elgesį demonstracijų metu, sulėtindami ir keisdami rankų padėtis, o pašalinę grįžtamąjį ryšį galėjo vizualizuoti.
Apibendrinant, siūloma ARMADA sistema išsprendė keičiamo dydžio duomenų rinkimo robotų imitacijos mokymuisi iššūkį, naudodama papildytąją realybę, kad būtų galima gauti grįžtamąjį ryšį realiuoju laiku, siekiant pagerinti duomenų kokybę ir suderinamumą su fiziniais robotais. Rezultatai parodė grįžtamojo ryšio svarbą suderinant demonstracijas be robotų su tikra roboto kinematika. Nors tyrimas buvo sutelktas į paprastesnes užduotis, būsimi tyrimai gali ištirti sudėtingesnes ir patobulinti metodus. Ši sistema gali būti pagrindas būsimiems robotikos tyrimams, ypač mokant robotų valdymo politiką imituojant mokymąsi su vizualiniais stebėjimais.
Patikrinkite į Popierius. Visi nuopelnai už šį tyrimą tenka šio projekto tyrėjams. Taip pat nepamirškite sekti mūsų Twitter ir prisijunk prie mūsų Telegramos kanalas ir LinkedIn group. Nepamirškite prisijungti prie mūsų 60k+ ML SubReddit.
🚨 Populiarumas: LG AI tyrimų išleidimas EXAONE 3.5: trys atvirojo kodo dvikalbiai AI lygio modeliai, teikiantys neprilygstamas instrukcijas ir ilgą konteksto supratimą, kad būtų pasaulinė lyderystė kuriant AI tobulumą….
Divyesh yra „Marktechpost“ konsultavimo praktikantas. Jis siekia žemės ūkio ir maisto inžinerijos bakalauro laipsnio Indijos technologijos institute Kharagpur. Jis yra duomenų mokslo ir mašininio mokymosi entuziastas, norintis integruoti šias pirmaujančias technologijas į žemės ūkio sritį ir spręsti iššūkius.
🧵🧵 (Atsisiųsti) Didelių kalbų modelio pažeidžiamumo ataskaitos įvertinimas (reklamuojamas)




